| Resolusi 14-bit dan 16-bit | 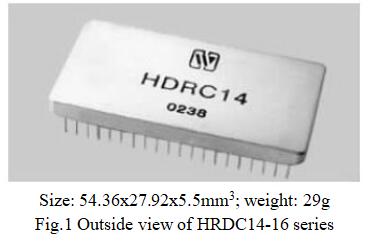 |
| 4′ dan 2′ akurasi | |
| Kapasitas penggerak keluaran 2VA | |
| Kesalahan vektor radius rendah (0,03%) | |
| Dilengkapi dengan proteksi tegangan lebih dan proteksi hubung singkat | |
| Dilengkapi dengan pin keluaran telemetri | |
| Tanpa perlu penyesuaian eksternal | |
| Kompatibilitas pin-to-pin dengan produk DRC1745/1746 dari perusahaan AD |
Sinkronisasi/penyelesai drive; sistem antena; sistem servo; terintegrasi
simulator.
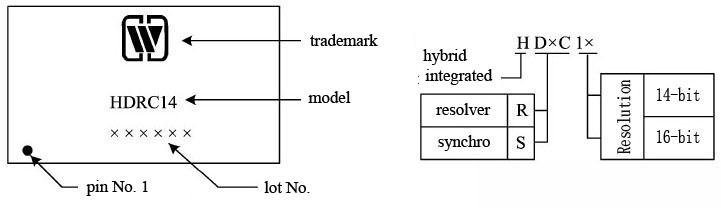
3. Deskripsi HDRC14-16 Series Digital to Synchro Converters atau Digital to Resolver Converters
Produk seri HDRC14/HDRC16 adalah konverter digital ke resolver atau
konverter digital ke sinkron dari struktur sirkuit terpadu hibrid
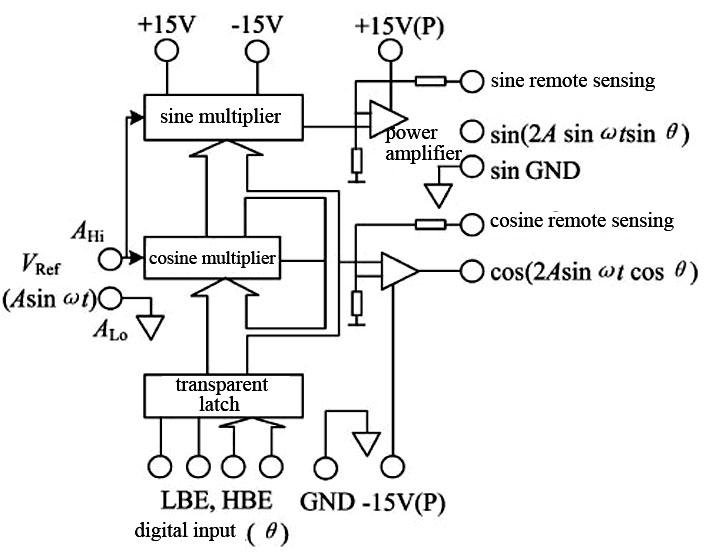
beban dapat berupa beban induktif, beban kapasitif atau beban resistif, dan itu adalah | |
dilengkapi dengan perlindungan arus lebih dan tegangan lebih. keluaran dari | konverter dapat langsung menggerakkan resolver, dan juga dapat menggerakkan mengendalikan trafo sinkron dengan menghubungkan trafo eksternal. Performa unik produk seri HDRC14/HDRC16 adalah sinus dan |
keluaran telemetri kosinus. Jadi, saat melakukan perjalanan jarak jauh, itu bisamemastikan ketepatan sinyal keluaran yang dikonversi. | Produk seri HDRC14/HDRC16 dilengkapi dengan kait internal, yang: dikendalikan melalui high bit enable end HBE dan low bit enable end LBE, dan dapat dihubungkan dengan bus data dengan nyaman. Produk seri HDRC14/HDRC16 adalah paket logam 40-pin in-line ganda. |
4. Performa listrik (Tabel 1, Tabel2) dari HDRC14-16 Series Digital to Synchro Converters atau Digital to Resolver Converters | ||||||
Tabel 1 Kondisi terukur dan kondisi pengoperasian yang direkomendasikan | Maks. mutlak nilai nilai | Tegangan suplai Vs: ± 7.25V | Tegangan logika VL: +5.5V | Kisaran suhu penyimpanan: -65℃~+150 | ||
Pengoperasian yang direkomendasikan | kondisi | Tegangan suplai Vs: ± 5V | Tegangan logika VL: +5V | |||
Frekuensi referensi f: 400Hz~2000Hz | - | 14 | - | 16 | Rentang suhu operasi TA: -55℃~125℃ | |
Tabel 2 Karakteristik listrik | - | Ciri | - | ±2 | HDRC14 | |
HDRC16 | Satuan | Perkataan | min. | Maks. | V | |
min. | Maks. | Resolusi | sedikit | Kesalahan sudut | V | |
±5.3 menit sudut | Masukan referensi analog | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | Keluaran sinyal dari resolver | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
Memperoleh | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Koefisien suhu perolehan keluaran | - | 2 | - | 2 | VA | |
PPM/℃ | - | Rentang frekuensi input analog | - | 2.6 | - | |
2.6 | kHz | Impedansi input analog | - | |||









 (2) Catu daya berdenyut
(2) Catu daya berdenyut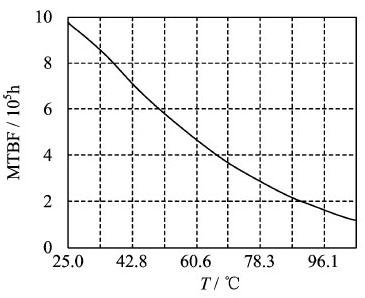

Z u003d beban keluaran | (3) Contoh konsumsi daya | Ada banyak faktor yang mempengaruhi konsumsi daya, yaitu | empat contoh berikut menggunakan beban tipikal dan sudut digital terburuk | keadaan (45º). Contoh-contoh ini dapat menggambarkan bahwa menggunakan daya berdenyut | dapat mengurangi konsumsi daya. | Di sini, kondisi operasinya adalah: | VDCu003d±15V; Vpu003d3V; Voutu003d9.6V (nilai RMS adalah 6.8V); VACu003d9.6V (kira-kira | sama dengan Vout); I1u003d292mA (setara dengan beban yang membutuhkan 1.4VA). |
1 | Catu daya DC, u003d45º, beban resistif | Sama seperti contoh 1, catu daya adalah catu daya berdenyut 3V. | 13 | Saat menggunakan daya berdenyut, konsumsi daya internal berkurang 1,75W, rasionya adalah 3,2:1. | Catu daya DC, u003d45º, beban induktif murni | 28 | Sama seperti contoh 3, catu daya adalah catu daya berdenyut 3V. | (4) Muat |
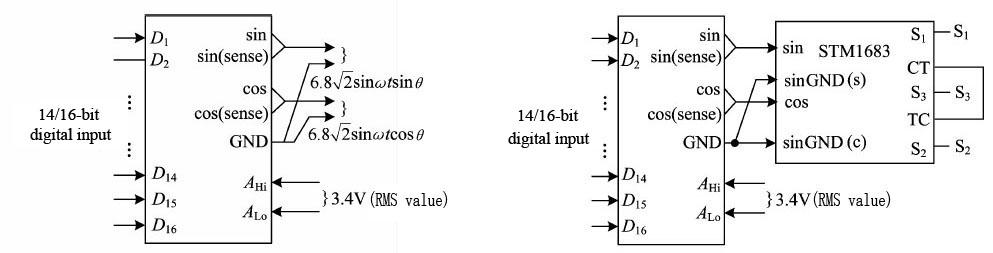
2 | D2 | Selanjutnya, kami akan mengilustrasikan cara menghitung beban. Untuk kontrol | 14 | transformator sinkron, terlebih dahulu harus diperoleh nilai Zso, | yang umumnya disediakan oleh pabrikan sinkronisasi. Kontrol | 29 | V- | beban adalah: |
3 | D3 | Dimana, V2 adalah nilai RMS dari tegangan sinyal. | 15 | Jika transformator keluaran ditambahkan pada pin keluaran, maka 0,25VA harus ditambahkan ke daya yang dihitung. | Misalnya, asumsikan bahwa nilai RMS sinyal adalah 90V, 400Hz, gunakan | 30 | V+ | Trafo keluaran eksternal HRDC14 untuk menggerakkan trafo kontrol dari |
4 | D4 | sinkron. Penggunaan trafo eksternal adalah untuk meningkatkan nilai RMS | 16 | output tegangan HRDC14 dari 6,8 V hingga 90V yang dibutuhkan oleh kontrol | transformator. | 31 | Untuk trafo kontrol sinkron, Zso adalah 700+j4900. | Oleh karena itu, beban saat menggunakan trafo kontrol adalah: |
5 | D5 | ; kemudian ditambah konsumsi daya tambahan transformator, konsumsi daya total adalah 1,48VA. | Cara ini juga bisa digunakan untuk aplikasi yang menggunakan rotary | NC | transformator kontrol, tetapi tidak perlu dikalikan dengan 3/4. | 32 | LE | 6. Kurva MTBF (Gbr. 3) dari HDRC14-16 Series Digital to Synchro Converters atau Digital to Resolver Converters |
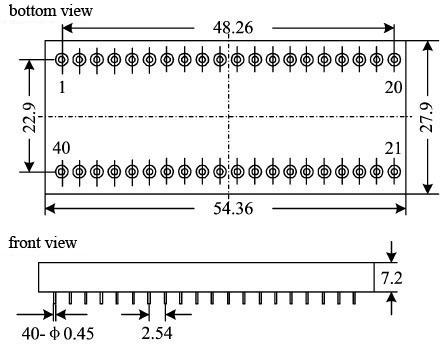
6 | D6 | Gbr. 3 kurva suhu MTBF | 21 | (Catatan: menurut GJB/Z299B-98, kondisi tanah dianggap baik) | 7. Penunjukan pin (gbr.4, Tabel 3) dari HDRC14-16 Series Digital to Synchro Converters atau Digital to Resolver Converters | 33 | HE | Gbr.4 Diagram skematik pin (tampilan bawah) |
7 | D7 | Tabel 3 Deskripsi fungsional pin | 22 | Pin | Simbol | 34 | Fungsi | Pin |
8 | D8 | Simbol | 23 | Fungsi | Pin | 35 | Simbol | Fungsi |
9 | D9 | D1 (MSB) | 24 | Masukan digital bit pertama | D13 | 36 | Input digital bit ke-13 | GNDA |
10 | Tanah analog | Masukan digital bit ke-2 | 25 | D14(LSB) | Masukan digital bit ke-14 | -15V Power supply | NC | Masukan digital bit ke-3 |
11 | H15 | Masukan digital bit ke-15 | 26 | + Catu daya 15V | Masukan digital bit ke-4 | |||
12 | D16 (LSB) | Masukan digital bit ke-16 | 27 | V1+ | Catu daya +5V |
Keluaran kosinus akhir | Pilihan tinggi 8-bit diaktifkan | Masukan digital bit ke-7 | Vsin | Ujung keluaran sinus | RLo | |
1 | Input referensi ujung bawah | 7 | Masukan digital bit ke-8 | 13 | V+P | |
2 | + daya berdenyut 15V | 8 | RHi | Masukan referensi kelas atas | Masukan digital bit ke-9 | |
3 | V-P | 9 | -15V daya berdenyut | 15 | Kasus | |
4 | Tempat kasus | 10 | H10 | Masukan digital bit ke-10 | kos telemetri | |
5 | Ujung telemetri kosinus | 11 | 37-40 | |||
6 | Tidak ada koneksi | 12 | D11 |
telemetri dosa | Ujung telemetri sinus |
 | |
diperlukan, maka "HBE" dan "LBE" dapat menjadi rangkaian terbuka. | Semua pin input digital memiliki resistansi pull-up 27kΩ di dalamnya untuk menjadi | terhubung dengan catu daya 5V, dengan demikian, jika arus 50μA pada input kait apa pun | pin bocor ke drive digital eksternal, masih dapat memastikan semua input | pin yang kompatibel dengan level TTL stabil. | 8. Tabel nilai bobot (Tabel 4) Seri HDRC14-16 Konverter Digital ke Sinkron atau Konverter Digital ke Resolver | Tabel 4 Tabel nilai bobot | Bit/(MSB) | Sudut |
Bit/(MSB) | Sudut | Bit/(MSB) | Sudut | 180.000 0 | 2.812 5 | 0,043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier